On March 26, 2012, filmmaker and National Geographic Explorer-in-Residence James Cameron piloted a one-man submersible to the deepest point in the world's oceans.
It's a completely hostile world, nearly 7 miles (10.9 km) beneath the ocean's surface. No light, temperatures just above freezing, and 16,000 lbs of pressure per square inch. That's Challenger Deep. Could anything live there? Could anyone survive the trip to find out?
Ten years ago, James Cameron pulled together a team from all over the world to find out. It was the first attempt in more than 50 years—and the only solo dive ever. Here's a behind-the-scenes look from a key team member, after the successful dive.
And the sub was controlled by...an-off-the-shelf Opto 22 SNAP PAC System
 The team completely re-thought deepsea diving. They invented a new type of syntactic foam to withstand extreme conditions. They designed fluid-compensated electronics for the sub's thrusters, controlled by joysticks. For the pilot, they built a steel sphere strapped to the sub's beam. They developed multiple methods for the pilot to communicate with the surface crew.
The team completely re-thought deepsea diving. They invented a new type of syntactic foam to withstand extreme conditions. They designed fluid-compensated electronics for the sub's thrusters, controlled by joysticks. For the pilot, they built a steel sphere strapped to the sub's beam. They developed multiple methods for the pilot to communicate with the surface crew.
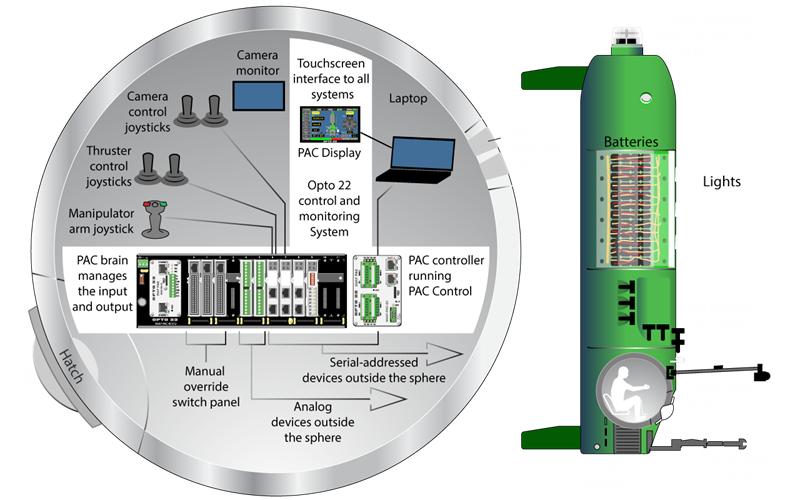
But to control and monitor more than 180 systems on the sub—including batteries, depth sensors, thrusters, 3D cameras, lighting, and life support—they chose an off-the-shelf SNAP PAC System from experienced automation manufacturer Opto 22.

The PAC in the sub
Chosen for its reliability and ability to communicate with a wide variety of other systems, the SNAP PAC System in the DEEPSEA CHALLENGER submersible was the same standard product found in applications worldwide.
The system included a SNAP-PAC-S2 programmable automation controller, a rack-mounted I/O processor, and analog, serial, and high-density discrete I/O modules. The SNAP-PAC-S2 controller was chosen primarily for its communications flexibility and speed. With its two independent Ethernet network interfaces and four individually configurable serial ports (RS-232, RS-485 2-wire or 4-wire), the PAC-S2 easily handled communication with the wide variety of devices and systems onboard.
The PAC Project Professional Software Suite provided control programming and HMI development and runtime. A touchscreen HMI just inches from Cameron's head kept him informed about everything going on in the sub, from battery power to oxygen levels. The system also read the pilot's joysticks to control the thrusters that propel and position the sub, and the robotic arms that collect samples and focus the underwater cameras.
Ten years later
A decade has passed since Cameron's epic dive, and control systems have changed since then. With even tougher industrial hardware, more built-in software options for control and data communications, and new cybersecurity features, today's systems like groov EPIC are even more powerful and suited to all kinds of automation and IIoT applications, no matter where they are.
Looking back on his unique experience as part of James Cameron's team, Opto 22 senior application engineer Ben Orchard reflects on what's changed and what's the same. Read Ben's 10-year anniversary blog post.